原创研究人员发布一个系统,教机器人使用推理来完成复杂的任务,成功率提高20%!
时间:2019-11-16 04:08:25 热度:37.1℃ 作者:网络
引述外媒报道,通过观察人类的示范,可以实现很多机器人,例如将一盒饼干从柜台搬到仓库的必要动作。但是模仿学习绝不是一门完美的科学-示威者通常会完成一些子目标,这些子目标分散了系统的总体任务。

为了解决这个问题,华盛顿大学,斯坦福大学,伊利诺伊大学厄本那-香槟分校,多伦多大学和英伟达大学的研究人员提出了一种“逆向计划”系统,该系统利用动作或低水平轨迹来捕捉动作意图。 。通过根据一组厨房目标收集并测试一组视频演示来评估他们的技术后,研究小组报告说,他们的运动推理方法将任务成功率提高了20%以上。
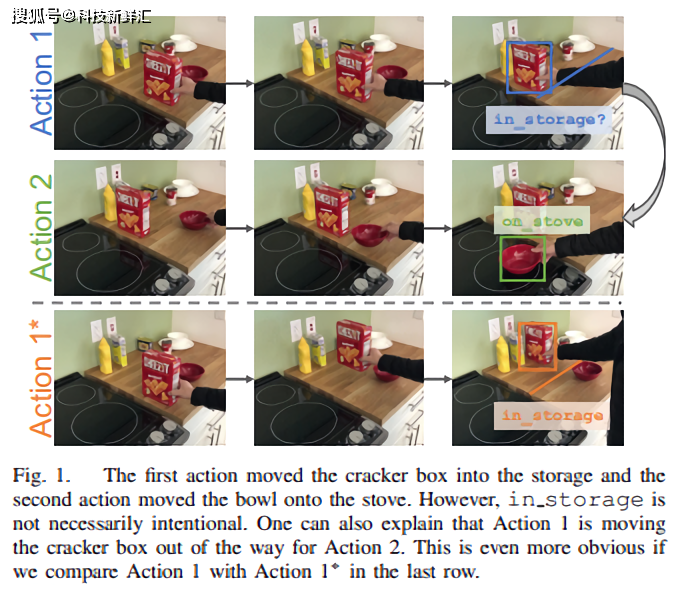
研究人员在预印本中详细介绍了他们的工作,以全面解决问题。在诸如杂乱的厨房之类的环境中,他们注意到对象的配置方式使目标变得模糊。仅仅知道一个动作序列是不够的,因为一个任务可能有无数的动机。例如,示威者可能移动桌布以将其从视野中移开并到达其下方的一把刀。
然后,研究人员的AI系统会在真实视频演示中输出任务的象征性目标,然后将其用作机器人系统的输入,以再现该任务。为了测试它,他们让它学习了一个24任务烹饪目标,一个人类厨师将预先准备好的配料(番茄汤和垃圾邮件)倒入并准备了三个对象,包括饼干盒,芥末瓶和糖盒。他们为每个任务总共记录了四个演示,总共进行了96个演示(不包括姿势严重缺失的视频),然后将任务分为两部分-12个用于系统培训,而12个用于测试。
研究人员说,他们的完整模型明确地对演示中的对象执行了运动推理,因此不会盲目地将所有对象运动都视为故意的。此外,他们指出,它使跨不同环境的模仿学习成为可能。在一个实验中,尽管操纵了一个物体(上述的糖盒),该系统仍设法成功地提取了正确的目标。尽管糖盒出现在厨房中,但机器人意识到它不需要移动,因为它已经挡不住了。
共同作者写道:“我们的结果表明,这使我们大大优于以前基于运动计划或任务计划来推断目标的方法。” “此外,我们证明了基于目标的表达方式使机器人只需观看样机厨房的视频演示,即可在真实厨房中重现相同的目标。”

