实测!除了识别行人和雪糕筒,特斯拉V10.0软件还有哪些秘密?
时间:2019-11-18 11:10:53 热度:37.1℃ 作者:网络
引言 | 软件是硬实力
特斯拉的OTA举世闻名,连上WiFi爱车就能下载官方最新软件,跟苹果的iOS系统非常像。好处是能让车辆常用常新,但其中也隐藏了不少秘密。
它表面上,会说更新了一些小游戏云云,但其实对动力、电池、Autopilot自动辅助驾驶等都会有所更新。但不知为什么,越重要的它越不明说。

一、特斯拉V10.0有哪些重要变化?
比如上海421火灾之后,用户发现更新了软件后续航里程变少了,最多的被隐藏了30%电量。有人猜测,这是特斯拉为了避免超充对电池的影响而锁定了部分电量,以降低起火风险。
这么重要的更新,它没有公开告知用户。
9月29日,特斯拉开始向中国用户推送V10.0软件。官方说:本次升级更注重娱乐性体验,引入了腾讯视频、爱奇艺、喜马拉雅等多媒体资源,同时对Autopilot的部分功能进行了细节方面的优化。
其实,从V10的编号看出,这是一次重要更新,不会只是官方说的娱乐性更新。
车聚君从10月30日收到第一次V10.0的更新通知,之后又陆续收到了两个补丁。通过实际体验和“豁出性命”的测试,发现了一些之前没想到的秘密。
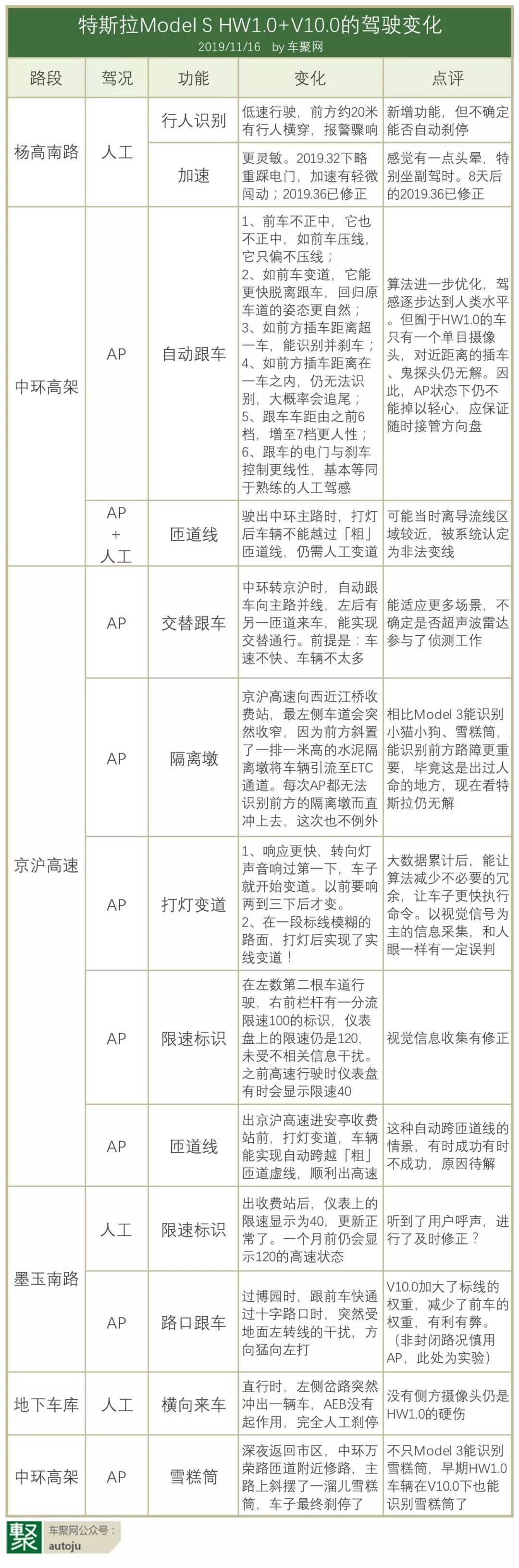
以下是硬件为HW1.0的Model S 75D,更新V10.0后的实测变化,供参考:
二、动力提升:一番折腾后更好开了
首先是动力更好了。以车聚君的Model S为例,以前过安亭一个接近正圆的弯道时,只能开到65km/h左右,更新完V10.0后可以开到72km/h。说明,这次更新提升了车辆的运动极限,在高速上的操作性和稳定性更好了。
随着后续补丁的推送,低速时的动力表现也有优化。
直接感受是,V10.0下的2019.32版本,让车子加速更灵敏。有时只是轻点一下电门,车子居然有一点向前窜的感觉,类似燃油车的“闯挡”,虽然也能接受,但这与之前电动车平顺的驾驶印象,有了出入。
更令人不解的是,这个版本居然会让乘客晕车!

那天同事去机场接我,开着这辆升级过的Model S,在市区随着车流向前挪动时,突然胃部涌起一阵不舒服的感觉,同时也有点头晕。当时以为是出差劳累所致,没在意。第二天自己开时,仍然有类似感觉。这是开了5万多公里以来,从来没有的情况。
现在,有点理解为什么有的敏感用户会觉得蔚来ES8有点晕船的感觉。
如果他们来坐这时的特斯拉,会更晕。因为车聚君坐ES8时没有觉得晕,而坐更新软件后的特斯拉时第一次体验到了电动车的晕。应该不是人的问题,因为平时可以坐在特斯拉后排一边跑高速一边对着电脑改稿子。
很快它又推送了2019.36版本,这时加速“闯动”和乘坐晕车的感觉没有了,加速更敏捷、线性和细腻了。
短短八天,让一部车的驾感有这么大的变化,软件真是太神奇了。
三、Autopilot等智能力,提升了
首先,它能识别横穿的行人了。在杨高南路行驶到一个十字路口前50米时,已是黄灯,车聚君收了电门自由滑行。这时人行道上走过一个行人,严格说他违章了,但在国内这种情况比较常见。
车辆此时距行人约20米,车聚君也看到行人了,正准备刹车时,车辆突然发出急促的警报声。印象中,这是Model S第一次对行人发出警报,以前是对前方太近的车辆报警。只是,不知它能否像沃尔沃的City Safety一样,如果人工未介入会自动刹停?
当然,咱也不敢试啊。
剩下的主要是Autopilot的改善了,变化非常大,整体有质的提升。如跟车距离由6档增加到了7档、自动跟车更有逻辑性了、打灯变道也好用了、车速识别的bug基本更正了,重要的是,它能识别修路时的雪糕筒了!
具体细节,上面的表格都有提到。
这些变化,90%都是正面的。你很难想像这是基于HW1.0的硬件实现的,因为它只有一个前向单目摄像头、一个中距毫米波雷达、12个超声波雷达,用的还是早已分手的Mobileye的EyeQ3芯片。
车聚君不确定,这是Mobileye基于善后协议做的跟进更新,还是特斯拉自己做的更新。

最该表扬的是,V10.0能识别雪糕筒了。但要注意,它的识别过程有点诡异。先是让速度从80km/h降到30km/h左右--你以为它要刹停了,不,它又加速了。直到离雪糕筒一米远时,才完全刹停。
可能它需要二次甄别。
特斯拉在HW1.0时代,只购买了博世的中程毫米波雷达,探测距离为160米。在毫米波雷达眼里,木头、彩绘塑料(画重点!)等障碍物像玻璃一样透明,而人是半透明的,金属障碍物又会被放大数倍。这或是它之前不能识别雪糕筒、行人的主要原因。
因此它目前的改进,很可能加大了视觉传感器的权重。即,提升了摄像头的识别能力。另一个证据是,它在跟车时更多的依据车道线,而不是前车的位移了。这种改变大多数场景下是合乎逻辑的,只是在标线不清时,可能会出乱子。
不管怎么说,这次V10.0的更新是一个里程碑。消除了之前的一些安全黑点,提升了老车主的行驶品质与安全性。这应该又是大数据的功劳!毕竟,特斯拉车主们在影子模式下为这家公司提供了近200万公里的实际行驶数据。
通过大数据的积累,芯片可以去除一些之前担心的冗余,而提升有效算力。利用相对单薄的视觉能力,就能判断出前方障碍物。
所以,未来的竞争是软件的竞争,核心是大数据的竞争。
车聚小结
一定要注意!这次V10.0仍有几个顽疾不能解决:
▎AP状态下前方的水泥隔离墩。
▎AP状态下侧方「近距离」插入的车辆。
▎普通模式下任何横向驶来的车辆。
因此,不管智能功能如何提升,任何车辆的驾驶员都应该对车辆的安全行驶负责,不要盲目迷信自动驾驶功能,它们目前都是辅助功能。
最后,请特斯拉车主们注意,它的软件推送是有先后顺序的。官方说是随机的,但据车聚君观察可能有一定选择机制。比如我们的车比最早一批收到V10.0更新的用户,整整晚了一个月。
难道,它怕早期软件有bug会被“非合作媒体”或“敏感用户”曝光?

